Please note, that this Library - Andino.py is not longer maintained.
You are welcome to use and adapt the library sources as a basis for your project.
Here is the GIT Repository
We recommend communicating directly with the firmware via the UART protocol for the Andino X1. For the "Andino IO" and "Andino Gateway", we recommend accessing the GPIO directly. Libraries for this are available for most programming languages.
Andinopy is an open-source software suite developed by Clear Systems to facilitate communication between between Andino boards and the Raspberry Pi.
Depending on your hardware configuration, there are two or three options available for enabling communication between the software and device IO. You can either use Andinopy as a TCP server to receive status messages and send commands (also possible via other software like Node-Red) or import it as a library into your own python project.
The following page gives an overview over all available possibilities:
The easiest option for communication between the software and IO is to use Andinopy as a TCP socket. This enables you to easily use a large variety of already existing applications to control inputs and outputs.

In this case, Andinopy either connects to the board firmware (for Andino X1) or directly to the inputs and outputs of the board (for Andino IO and Andino Terminal). Andinopy can then be connected to via TCP on port 9999 using various software (e.g. Node-Red). The connected application will then receive messages from the Andinopy about inputs from the IO and can send commands to control outputs.
For a list of all available commands and message formats, please refer to Common Andino Protocol.
For all setup and usage instructions, please follow the guide at Andinopy: Setup and Usage. Specifically refer to the Setup and TCP server usage sections.
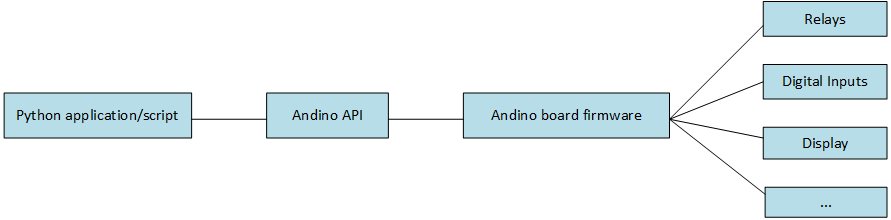
Andinopy can also be imported into your Python project and directly imported into your python code. This makes it very convenient to control the IO of the board from your own application and also allows you to create software that works on multiple Andino devices.
As for the TCP socket, for all setup and usage instructions, please follow the guide at Andino API: Setup and usage. Specifically refer to the Setup and Usage as python library sections.
The option of communicating directly with the board firmware is only available on the Andino X1
The settings for the communication with the controller are as follows (example shows the configuration menu of Minicom, other software similar):
+-----------------------------------------------------------------------+
| A - Serial Device : /dev/ttyAMA0 |
| B - Lockfile Location : /var/lock |
| C - Callin Program : |
| D - Callout Program : |
| E - Bps/Par/Bits : 38400 8N1 |
| F - Hardware Flow Control : No |
| G - Software Flow Control : No |
| |
| Change which setting? |
+-----------------------------------------------------------------------+A more detailed tutorial on how to do this can be found on our Youtube channel.
- 2022 by AndinoSystems
- Contact us via email